Descripition du procédé

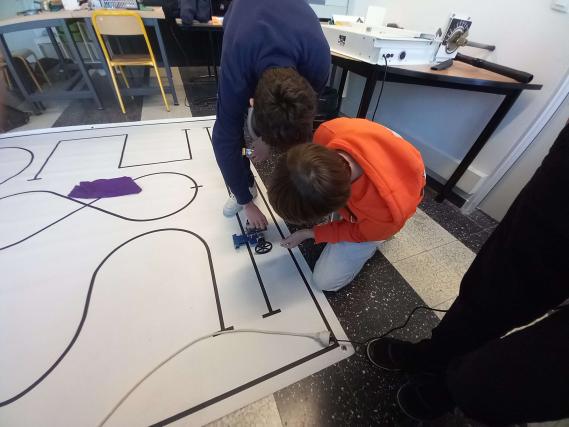
Nous l'avons donc testé. Durant 2 semaines nous avons réglé le pid.
Nous avons eu du mal car chaque jour il fallait le rerégler. Nous avons suspecté que cela devait être causé par la luminosité.
Nous avons donc acheté une banderole de led. Ceci a fonctionné pour régler la luminosité. Donc avec le capteur qtr nous pouvions suivre toutes les lignes.
Pour réaliser le compteur, nous souhaitons récupérer les 2 capteurs au extrémité de la barette qtr avec résultats en numérique pour pouvoir compter les intersections.
Nous n'avons pas réussi à les récupérer en numérique.
Puis nous devons mettre 2 qtr capteurs individuels aux extrémités du robot. Cela n'a pas fonctionné, nous pensions que les capteurs rajoutés intervenaient sur le PID, car ce sont des capteurs qtr, comme la barrette.
Mais cela n'a pas été le cas.
Progressivement, nous avons pensé à rajouter des capteurs infrarouge classiques afin que le robot détecte les intersections mais rien ne fonctionnait, il tournait aléatoirement. Ils étaient posés aux extrémités du robot. Pour nous c’était incompréhensible car notre programme semblait bon et on récupérait les informations en digital sur les capteurs IR classiques et la barrette QRT récupérait les informations analogiques.
Donc il aurait du y avoir aucune interférence entre ces capteurs.



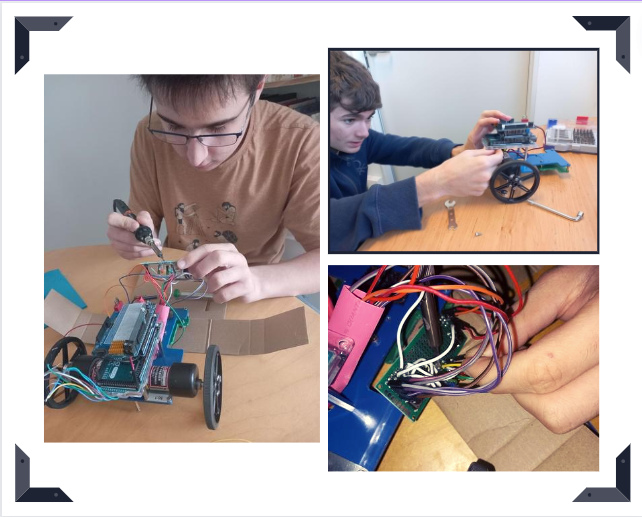
Nous avons donc refait intégralement le robot avec moins de soudures, avec de nouveaux fils et Anton a réalisé un nouveau support sur Solidworks pour découper la plaque en plastique à la CNC pour plus de précision et être sûr qu’elle était bien horizontale. Avant, l’ancien châssis était découpé avec la scie circulaire. Nous avons rajouté un écran pour plus tard.


Nous étions soulagés !
Nous avons rebranché les capteurs infrarouges latéraux pour voir si il n'y avait pas d'interférence. Il n’y en avait aucune.
Nous avons donc dû rerégler le PID puisqu'il change si on déplace la barrette et si on change le poids du robot.
Une fois le PID bien réglé, nous avons rajouté, dans le programme, la possibilité de faire un calibrage automatique. Nous avons utilisé les 2 capteurs infrarouge latéraux pour le réaliser. Cela fonctionnait à peu près car au début le robot ne tournait qu’à droite. Puis nous avons réussi le calibrage.
Etape par étape, on reprenait confiance.
Puis nous avons commencé à travailler sur la petite piste où il faut tourner à la 2ème intersection avec le compteur pour cela nous avons utilisé l'écran pour afficher les intersections qu'il comptait. Et nous avons réfléchit à comment faire tourner le robot.
On affiche les intersections sur l'écran comme sur l'image.
Nous avons réussi à tourner par plusieurs conditions puis le suiveur de ligne prend le relai.
Cependant nous avons réussi à la faire en faisant d'autres conditions nous avons réussi à réaliser la dernière piste.
Nous avons donc commencé à travailler sur la première piste.
En moins de 2h nous arrivions à réaliser la piste, mais ça ne fonctionnait pas tout le temps.
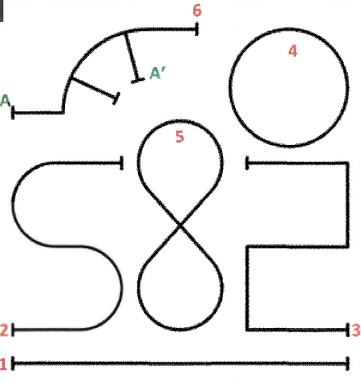 Nous sommes passés au chemin 8 de la 2ème piste, même si on savait déjà le faire. Nous travaillions sur cette piste pour augmenter la vitesse donc aussi la précision du PID. nous avons pu le faire en 5.6s environ.
Puis on s'est remis à travailler sur la 1ère piste. En plusieurs séances, nous avons pu réaliser un code avec lequel le robot arrivait à chaque fois à suivre la piste.
Nous sommes passés au chemin 8 de la 2ème piste, même si on savait déjà le faire. Nous travaillions sur cette piste pour augmenter la vitesse donc aussi la précision du PID. nous avons pu le faire en 5.6s environ.
Puis on s'est remis à travailler sur la 1ère piste. En plusieurs séances, nous avons pu réaliser un code avec lequel le robot arrivait à chaque fois à suivre la piste.
Le robot ne faisait plus le calibrage. Nous avons testé tous les câbles reliés au bouton de calibrage. Tout faisait contact. On s'est dit qu'on allait changer le câble du bouton.
Tout a refonctionné, donc on a supposé que le câble était défectueux.
Nous avons continué à travailler sur les piste 1 et 3 pour augmenter la vitesse.
ou:
Envoyer un message
© 2023 Membres d'ATLHD . Tous droits reservés
 Nous nous excusons pour la vitesse d'actualisation, nous hébergons notre site, sur un serveur lent.
Nous nous excusons pour la vitesse d'actualisation, nous hébergons notre site, sur un serveur lent.



